2823
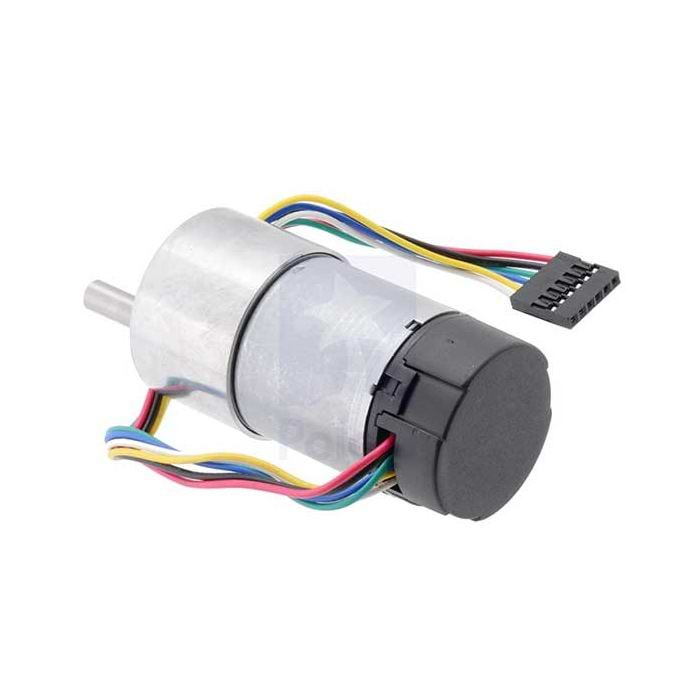
30:1 Metal Gearmotor 37Dx68L mm with 64 CPR Encoder
Only 1 left
£37.31 £31.09
This gearmotor is a powerful 12V brushed DC motor with a 30:1 metal gearbox and an integrated quadrature encoder that provides a resolution of 64 counts per revolution of the motor shaft, which corresponds to 1920 counts per revolution of the gearbox’s output shaft.
Dimensions:
| Size: | 37D x 68L mm1 |
|---|---|
| Weight: | 215 g |
| Shaft diameter: | 6 mm² |
General specifications:
| Gear ratio: | 30:1 |
|---|---|
| No-load speed @ 12V: | 330 rpm |
| No-load current @ 12V: | 0.2 A |
| Stall current @ 12V: | 5.5A³ |
| Stall torque @ 12V: | 14 kg·cm3 |
| No-load speed @ 6V: | 170 rpm4 |
| No-load current @ 6V: | 0.15A4 |
| Stall current @ 6V: | 3.0 A5 |
| Stall torque @ 6V: | 7.9 kg·cm5 |
Performance at maximum efficiency
| Max efficiency @ 12V: | 54 % |
|---|---|
| Speed at max efficiency: | 280 rpm |
| Torque at max efficiency: | 1.8 kg·cm |
| Current at max efficiency: | 0.78 A |
| Output power at max efficiency: | 5.1 W |
General specifications
| Lead length: | 20 cm6 |
|---|---|
| Encoders?: | Y |
| Encoder resolution: | 64 CPR |
Notes:
- 1
- Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
- 2
- D shaft.
- Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
- This motor will run at 6 V but is intended for operation at 12 V.
- 5
- Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. This motor will run at 6 V but is intended for operation at 12 V.
- 6
- May vary by a few centimeters.
