Pololu Distance Sensor with Pulse Width Output, 50cm Max
This small lidar-based distance sensor reports the distance of objects up to about 50 cm (20″) away with a pulsed signal similar to a hobby servo control signal.
A digital microcontroller pin can be used to time the length of each high pulse, which encodes the measured distance. The sensor works over an input voltage range of 3.0 V to 5.5 V, and the 0.1″ pin spacing makes it easy to use with standard solderless breadboards and 0.1″ perfboards.
Note: The maximum range of 50 cm is only achievable for high-reflectance objects in good ambient conditions. Lower-reflectivity targets or poor ambient conditions will reduce the maximum range.
This compact sensor makes it possible to measure the distance of objects up to about 50 cm (20″) away using a simple digital pulse width interface (similar to a hobby servo control signal). It uses a short-range lidar module to precisely measure how long it takes for emitted pulses of infrared, eye-safe laser light to reach the nearest object and be reflected back, allowing for 3 mm resolution. As long as the sensor is enabled, it takes continuous distance measurements and encodes the ranges as the widths of high pulses, which can then be timed by a microcontroller using a single digital input.
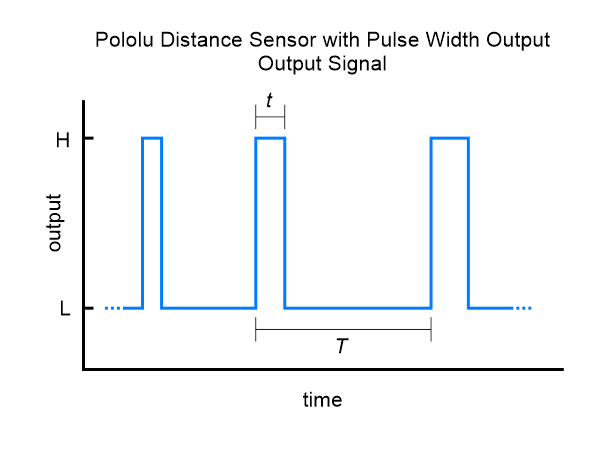 |
The relationship between measured distance d (in mm) and pulse width t (in µs) is as follows:
d=3 mm4 µs⋅(t –1000 µs)d=3 mm4 µs⋅(t –1000 µs)
t=1000 µs+4 µs3 mm⋅dt=1000 µs+4 µs3 mm⋅d
The timing uncertainty is approximately ±5%. As objects approach the sensor, the output pulse width will approach 1.0 ms, while an object detected at 50 cm will produce a 1.667 ms pulse width. The sensor uses a pulse width of 2.0 ms to indicate no detection. The pulse period T ranges from around 9 ms to 20 ms, depending on the proximity of the detected object.
The maximum detection range depends on object reflectivity and ambient lighting conditions. In our tests, the sensor was able to reliably detect a white sheet of paper out to around 50 cm away, and it could reliably detect a hand out to around 30 cm away. The following graph shows the measured distances of five units versus their actual distances from a white paper target at several different ranges:
 |
Please note that while this sensor can detect objects almost all the way up to the sensor face, the effective minimum distance it can measure is around 1 cm, so objects closer than 1 cm might still result in a measured distance of around 1 cm.
|
Size: |
0.85" x 0.35" x 0.122" |
|
Weight: |
0.4g |
|
Resolution: |
3mm |
|
Maximum range: |
50cm |
|
Sampling rate: |
50Hz ¹ |
|
Minimum operating voltage: |
3.0V |
|
Maximum operating voltage: |
5.5V |
|
Supply current: |
30mA² |
|
Output type: |
Digital Pulse Width |
Notes:
1 Minimum
2 Typical average current draw when enabled; disabling via the EN pin reduces it to around 0.4 mA
