Zumo Robot for Arduino V1.2
The Zumo robot for Arduino is an Arduino-controllable tracked robot platform that is less than 10 cm × 10 cm, small enough to qualify for Mini Sumo.
- No soldering or assembly is required.
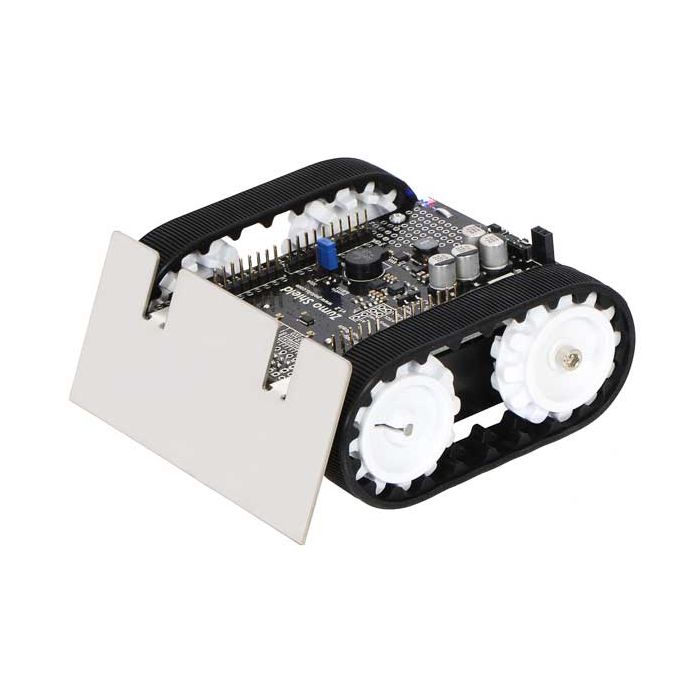
It includes two micro metal gearmotors coupled to a pair of silicone tracks, a stainless steel bulldozer-style blade, an array of six infrared reflectance sensors for line following or edge detection. A buzzer for simple sounds and music, a 3-axis accelerometer, magnetometer, and gyro for detecting impacts and tracking orientation. Just add 4 AA batteries and an Arduino (or compatible controller) and you are ready.
This Zumo robot is a low-profile tracked robot platform intended for use with an Arduino (or compatible device, such as an A-Star 32U4 Prime) as its main controller. It measures less than 10 cm on each side and weighs approximately 300 g with an Arduino Uno and batteries (165 g without, as shipped), so it is both small enough and light enough to qualify for Mini-Sumo competitions.
It uses two 75:1 HP micro metal gearmotors to drive the treads, providing plenty of torque and a top speed of approximately 2 feet per second (60 cm/s), which makes it much more agile than competing robots like the Solarbotics Sumovore and Parallax SumoBot while still offering plenty of control.
The Zumo robot includes a 0.036"-thick laser-cut stainless steel sumo blade mounted to the front of the chassis for pushing around objects like other robots, and a reflectance sensor array mounted along the front edge of the Zumo (behind the sumo blade) allows the Zumo to detect features on the ground in front of it, such as lines for following or edges for avoiding.
.jpg)


